I’ve started working with a number of my colleagues on a series of videos for internal training at Bang & Olufsen. They were kind enough to make some of these videos publicly available.
This video explains (and demonstrates) how recording engineers are able to control the perceived location of different sound sources in a two-channel stereo recording using different techniques.
I’ve started working with a number of my colleagues on a series of videos for internal training at Bang & Olufsen. They were kind enough to make some of these videos publicly available.
This video explains how we are able to localise the direction of and the distance to a sound source in the real world.
I’ve started working with a number of my colleagues on a series of videos for internal training at Bang & Olufsen. They were kind enough to make some of these videos publicly available.
This one explains some basic concepts of human hearing in the frequency domain, including how our hearing changes with level, the reason we use “loudness” processing in loudspeakers, and psychoacoustic masking.
I’ve started working with a number of my colleagues on a series of videos for internal training at Bang & Olufsen. They were kind enough to make some of these videos publicly available.
This first one explains the basics: how sound is produced, how it travels through air, and some of its basic measures like the speeds of sound, frequency, wavelength, amplitude, and why sound gets quieter with distance.
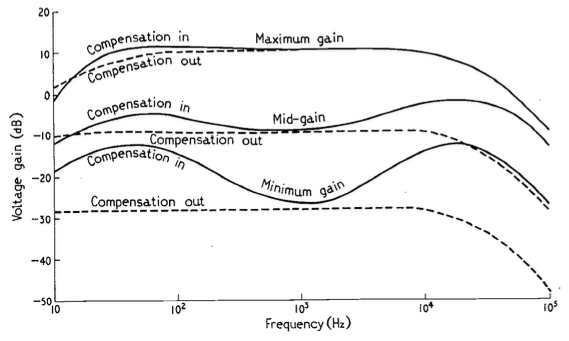
The June, 1968 issue of Wireless World magazine includes an article by R.T. Lovelock called “Loudness Control for a Stereo System”. This article partly addresses the issue of resistance behaviour one or more channels of a variable resistor. However, it also includes the following statement:
It is well known that the sensitivity of the ear does not vary in a linear manner over the whole of the frequency range. The difference in levels between the threshold of audibility and that of pain is much less at very low and very high frequencies than it is in the middle of the audio spectrum. If the frequency response is adjusted to sound correct when the reproduction level is high, it will sound thin and attenuated when the level is turned down to a soft effect. Since some people desire a high level, while others cannot endure it, if the response is maintained constant while the level is altered, the reproduction will be correct at only one of the many preferred levels. If quality is to be maintained at all levels it will be necessary to readjust the tone controls for each setting of the gain control
The article includes a circuit diagram that can be used to introduce a low- and high-frequency boost at lower settings of the volume control, with the following example responses:
These days, almost all audio devices include some version of this kind of variable magnitude response, dependent on volume. However, in 1968, this was a rather new idea that generated some debate.
In the following month’s issue The Letters to the Editor include a rather angry letter from John Crabbe (Editor of Hi-Fi News) where he says
Mr. Lovelock’s article in your June issue raises an old bogey which I naively thought had been buried by most British engineers many years ago. I refer, not to the author’s excellent and useful thesis on achieving an accurate gain control law, but to the notion that our hearing system’s non-linear loudness / frequency behaviour justifies an interference with response when reproducing music at various levels.
Of course, we all know about Fletcher-Munson and Robinson-Dadson, etc, and it is true that l.f. acuity declines with falling sound pressure level; though the h.f. end is different, and latest research does not support a general rise in output of the sort given by Mr. Lovelock’s circuit. However, the point is that applying the inverse of these curves to sound reproduction is completely fallacious, because the hearing mechanism works the way it does in real life, with music loud or quiet, and no one objects. If `live’ music is heard quietly from a distant seat in the concert hall the bass is subjectively less full than if heard loudly from the front row of the stalls. All a `loudness control’ does is to offer the possibility of a distant loudness coupled with a close tonal balance; no doubt an interesting experiment in psycho-acoustics, but nothing to do with realistic reproduction.
In my experience the reaction of most serious music listeners to the unnaturally thick-textured sound (for its loudness) offered at low levels by an amplifier fitted with one of these abominations is to switch it out of circuit. No doubt we must manufacture things to cater for the American market, but for goodness sake don’t let readers of Wireless World think that the Editor endorses the total fallacy on which they are based.
with Lovelock replying:
Mr. Crabbe raises a point of perennial controversy in the matter of variation of amplifier response with volume. It was because I was aware of the difference in opinion on this matter that a switch was fitted which allowed a variation of volume without adjustment of frequency characteristic. By a touch of his finger the user may select that condition which he finds most pleasing, and I still think that the question should be settled by subjective pleasure rather than by pure theory.
and
Mr. Crabbe himself admits that when no compensation is coupled to the control, it is in effect a ‘distance’ control. If the listener wishes to transpose himself from the expensive orchestra stalls to the much cheaper gallery, he is, of course, at liberty to do so. The difference in price should indicate which is the preferred choice however.
In the August edition, Crabbe replies, and an R.E. Pickvance joins the debate with a wise observation:
In his article on loudness controls in your June issue Mr. Lovelock mentions the problem of matching the loudness compensation to the actual sound levels generated. Unfortunately the situation is more complex than he suggests. Take, for example, a sound reproduction system with a record player as the signal source: if the compensation is correct for one record, another record with a different value of modulation for the same sound level in the studio will require a different setting of the loudness control in order to recreate that sound level in the listening room. For this reason the tonal balance will vary from one disc to another. Changing the loudspeakers in the system for others with different efficiencies will have the same effect.
In addition, B.S. Methven also joins in to debate the circuit design.
Apart from the fun that I have reading this debate, there are two things that stick out for me that are worth highlighting:
Notice that there is a general agreement that a volume control is, in essence, a distance simulator. This is an old, and very common “philosophy” that we forget these days.
Pickvance’s point is possibly more relevant today than ever. Despite the amount of data that we have with respect to equal loudness contours (aka “Fletcher and Munson curves”) there is still no universal standard in the music industry for mastering levels. Now that more and more tracks are being released in a Dolby Atmos-encoded format, there are some rules to follow. However, these are very different from 2-channel materials, which have no rules at all. Consequently, although we know how to compensate for changes in response in our hearing as a function of level, we don’t know what the reference level should be for any given recording.
The July 1968 issue of Wireless World Magazine contains a description of an early, but interesting analysis of the relationship between phantom image placement in a 2-channel stereo system and interchannel level differences. This is an old favourite topic of mine, originally inspired by the work of Michael Williams and his “Stereophonic Zoom”, and extending to my first AES paper in 1999.
If you, like me, are interested in this (for example, if you’re making a panning algorithm or you’re testing the veracity of headphone-based “virtual” systems), some important figures from that article are shown below.
The typical way of showing the relationship between IAD and phantom image placement.
This one is interesting because it shows the different results in different rooms, (which would also be influenced by loudspeaker directivity.)
Note that, for the plots above and below, the x-axes show the position of the image in the stereo sound stage, where 0 is the centre point between the two loudspeakers and 0.5 is a position in one of the two loudspeakers. This is 0.5 because it’s one-half of the total angular distance between the two loudspeakers. So, you can consider the loudspeaker aperture as ±0.5.
The relationship between image WIDTH and position. This is something I’ve not seen expressed so clearly before.
For more information similar to this, see these links as a start:
In Part 2, I showed the raw magnitude response results of three pairs of headphones measured on three different systems, each done 5 times. However, when you plot magnitude responses on a scale with 80 dB like I did there, it’s difficult to see what’s going on.
Differences in measurements relative to average
One way to get around this issue is to ignore the raw measurement and look at the differences between them, which is what we’ll do here. This allows us to “zoom in” on the variations in the measurements, at the cost of knowing what the general overall responses are.
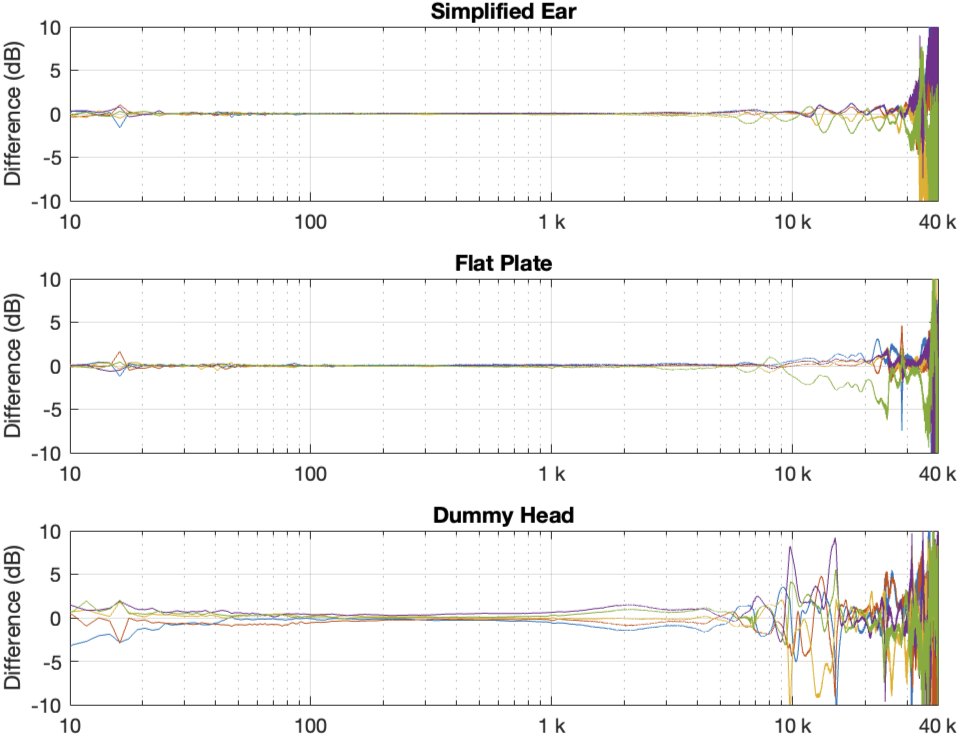
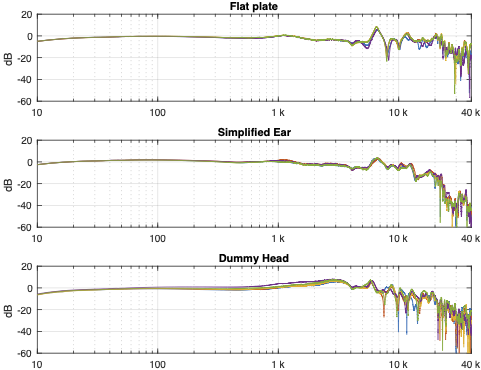
Figure 1 in Part 2 showed the 5 x 3 sets of raw magnitude responses of the open headphones. I then take each set of 5 measurements (remember that these 5 measurements were done by removing the headphones and re-setting them each time on the measurement rig) and find their average response. Then I plot the difference between each of the 5 measurements and that average, and this is done for each of the three measurement systems, as shown below in Figure 1.
Figure 1: Open headphones: The difference between each of the 5 measurements done on each system and the mean (average) of those 5 measurements.
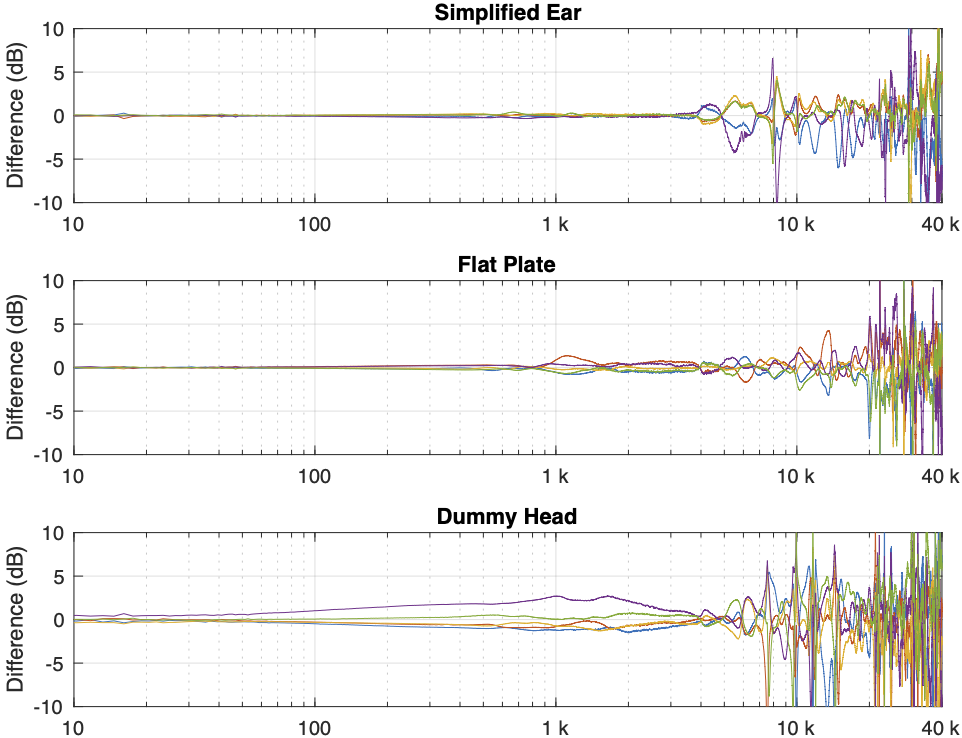
Figure 2: Semi-open headphones: The difference between each of the 5 measurements done on each system and the mean (average) of those 5 measurements.
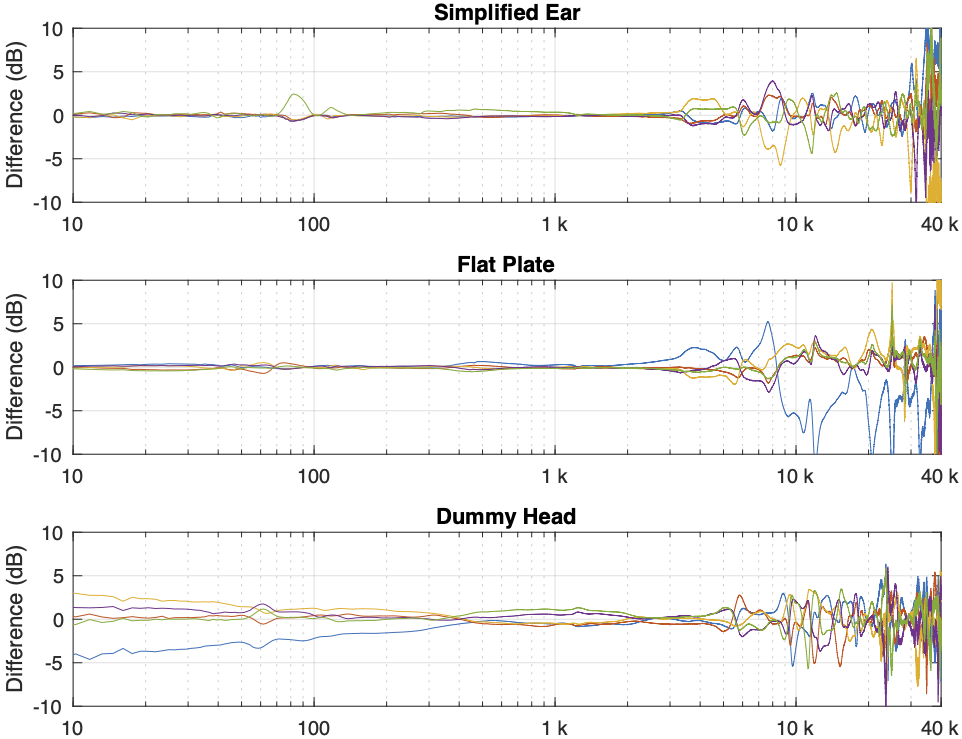
Figure 3: Closed headphones: The difference between each of the 5 measurements done on each system and the mean (average) of those 5 measurements.
Some of the things that were intuitively visible in the plots in Part 2 are now obvious:
There is a huge change in the measured magnitude response in the high frequency bands, even when the pair of headphones and the measurement rig are the same. This is the result of small changes in the physical position of the headphones on the rig, as well as changes in the clamping force (modified by moving the headband extension). I intentionally made both of these “errors” to show the problem. Notice that the differences here are greater than ±10 dB, which is a LOT.
Overall, the differences between the measurements on the dummy head are bigger and have a lower frequency range than for the other two systems. This is mostly due to two things:
because the dummy head has pinnae (ears), very small changes in position result in big changes in response
it is easier to have small leaks around the ear cushions on a dummy head than with a flat surrounding of a metal plate or an artificial ear. This is the reason for the low-frequency differences with the closed headphones. Leaks have no effect on open headphone designs, since they are always leaking out through the diaphragm itself.
The differences that you can see here are the reason that, when we’re measuring headphones, we never measure just once. We always do a minimum of 5 measurements and look at the average of the set. This is standard practice, both for headphone developers and experienced reviewers like this one, for example.
In addition to this averaging, it’s also smart to do some kind of smoothing (which I have not done here…) to avoid being distracted by sharp changes in the response. Sharp peaks and dips can be a problem, particularly when you look at the phase response, the group delay, or looking for ringing in the time domain. However, it’s important to remember that the peaks and dips that you see in the measurements above might not actually be there when you put the headphones on your head. For example, if the variations are caused by standing waves inside the headphones due to the fact that the measurement system itself is made of reflective plastic or metal (but remember that you aren’t…) then the measurement is correct, but it doesn’t reflect (ha ha…) reality…
One additional thing to remember with these plots is that something that looks like a peak in the curve MIGHT be a peak, but it might also be a dip in the average curve because we’re only looking at the differences in the responses.
System differences
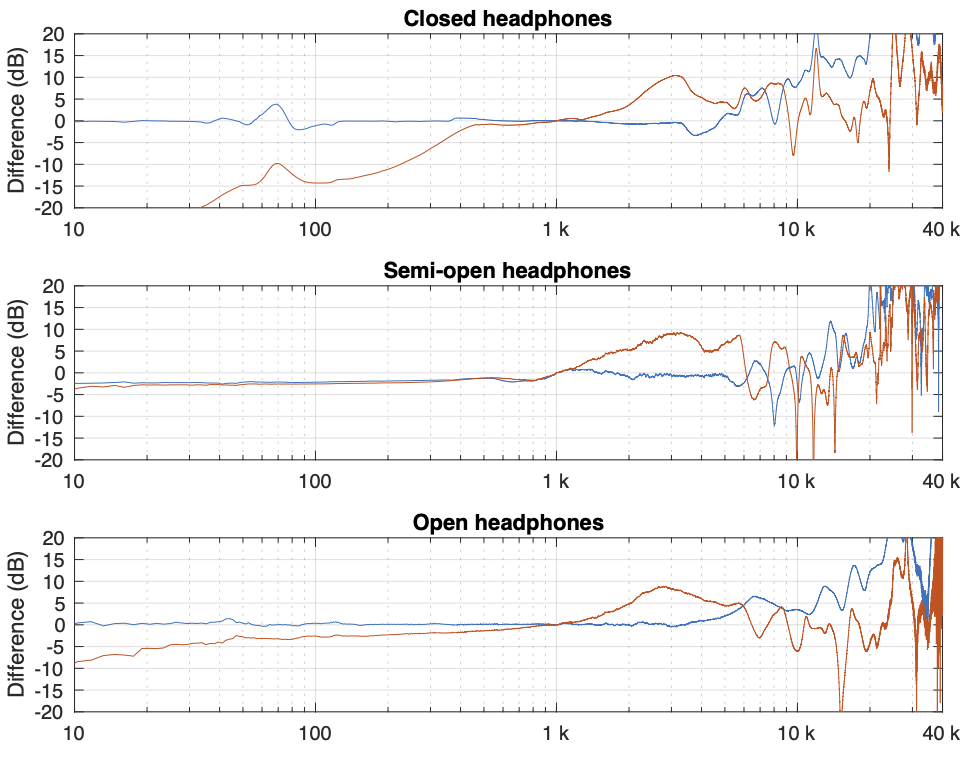
Instead of looking at the differences between each individual measurement and the average of the measurement set, we can also look at the differences between what each measurement system is telling us for each headphone type. For example, if I take one measurement of a pair of headphones on each system, and pretend that one of them is “correct”, then I can find the difference between the measurements from the other two systems and that “reference”.
Figure 4. One measurement for each pair of headphones on each measurement system. The red curves are the dummy head and the blue curves are the artificial ear RELATIVE TO THE FLAT PLATE.
In Figure 4, I’m pretending that the flat plate is the “correct” system, and then I’m plotting the difference between the dummy head measurement (in red) and the artificial ear measurement (in blue) relative to it.
Again, it’s important to remember with these plots is that something that looks like a peak in the curve might actually be a dip in the “reference” curve. (The bump in the red lines around 2 – 3 kHz is an example of this…)
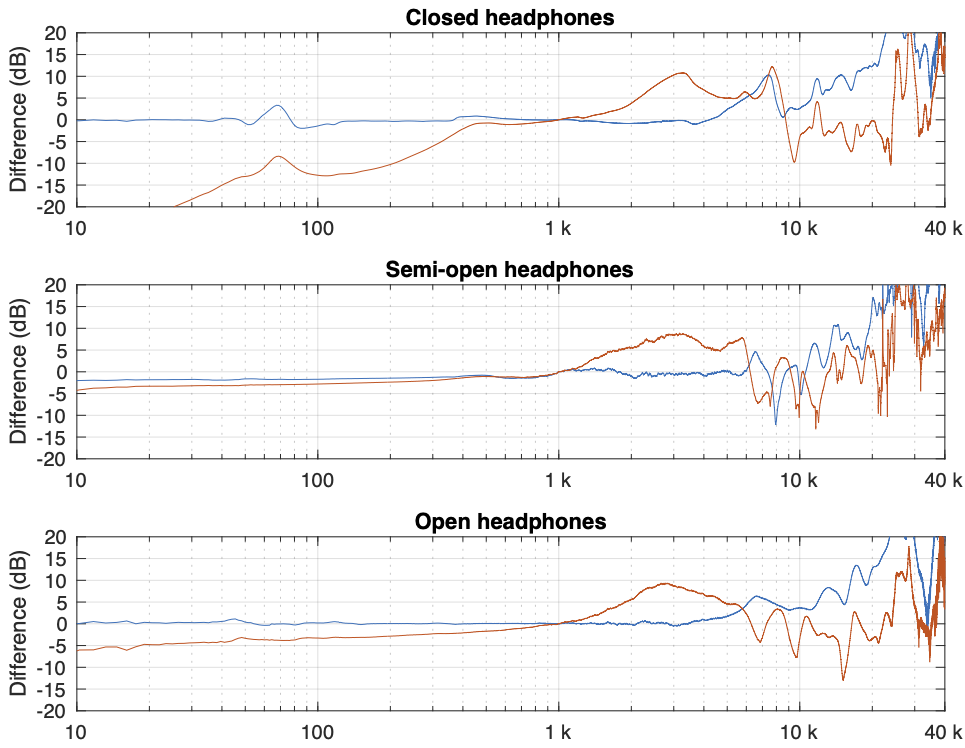
Of course, you could say “but you just said that we shouldn’t look at a single measurement”… which is correct. If we use the averages of all 5 measurements for each set and do the same plot, the result is Figure 5.
Figure 5. The average of all 5 measurements for each pair of headphones on each measurement system. The red curves are the dummy head and the blue curves are the artificial ear relative to the flat plate.
You can see there that, by using the averaged responses instead of individual measurements, the really sharp peaks and dips disappear, since they smooth each other out.
Comparing headphone types
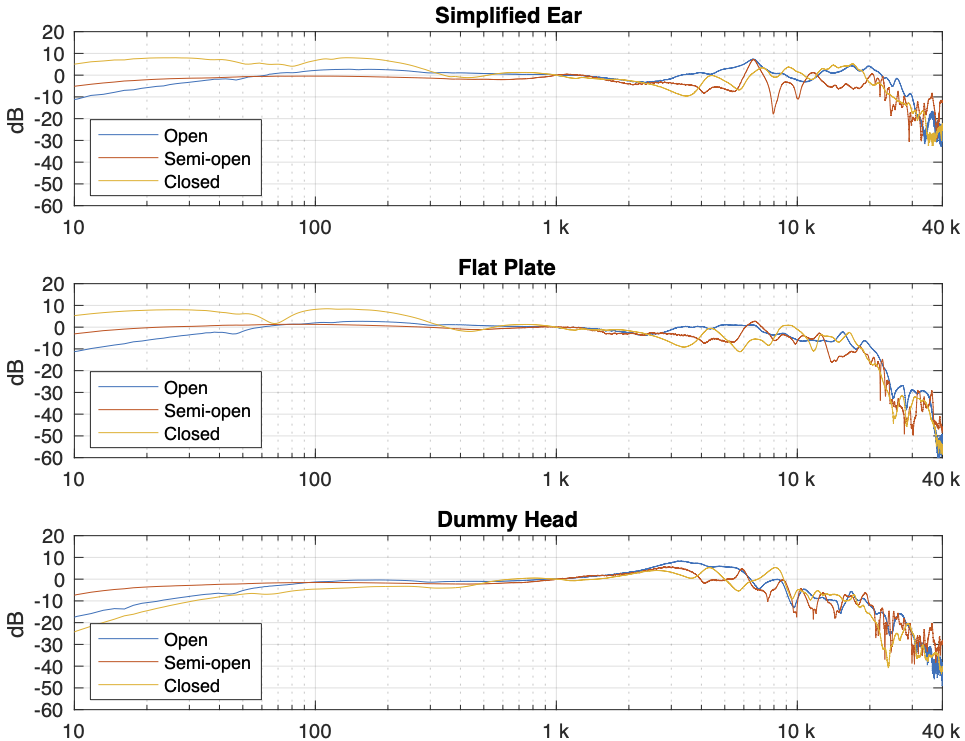
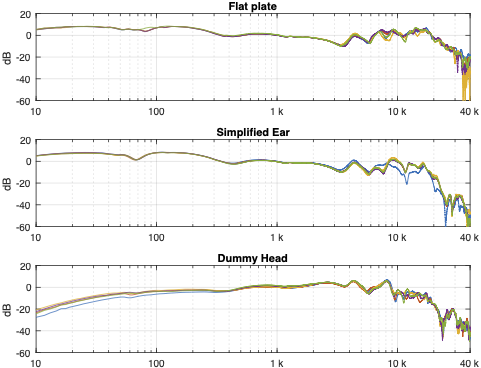
Things get even more complicated if you try to compare the headphones to each other using the measurement systems. Figure 6, below, shows the averages of the five measurements of each pair of headphones on each measurement system, plotted together on the same graphs (normalised to the levels at 1 kHz), one for each measurement system.
Figure 6: Comparing the three pairs of headphones on each measurement system.
This is actually a really important figure, since it shows that the same headphones measured the same way on different systems tell you very different things. For example, if you use the “simplified ear” or the “flat plate” system, you’ll believe that the closed headphones (the yellow line) is about 10 – 15 dB higher than the open headphones (the blue line) in the low frequency region. However, if you use the “dummy head” system, you’ll believe that the closed headphones (the yellow line) is about 5 – 10 dB lower than the open headphones (the blue line) in the low frequency region.
Which one is correct? They all are, even though they tell you different things. After all, it’s just data… The reason this happens is that one measurement system cannot be used to directly compare two different types of headphones because their acoustic impedances are different. With experience, you can learn to interpret the data you’re shown to get some idea of what’s going on. However, “experience” in that sentence means “years of correlating how the headphones sound with how the plots look with the measurement system(s) you use”. If you aren’t familiar with the measurement system and how it filters the measurement, then you won’t be able to interpret the data you get from it.
That said, you MIGHT be able to use one system to compare two different pairs of open headphones or two different pairs of closed headphones, but you can’t directly compare measurements of different headphone types (e.g. open and closed) reliably.
This also means that, if you subscribe to two different headphone magazines both of which use measurements as part of their reviews, and one of them uses a flat plate system while the other uses a dummy head, the same pairs of headphones might get opposite reviews in the two magazines…
Which review can you trust? Both of them – and neither of them.
Conclusions
Looking at these plots, you could come to the conclusion that you can’t trust anything, because no two measurements tell you the same things about the same devices. This is the incorrect conclusion to draw. These measurement systems are tools that we use to tell us something about the headphones on which we’re working. And people who use these tools daily know how to interpret the data they see from them. If something looks weird, they either expected it to look weird, or they run the measurement on another system to get a different view.
The danger comes when you make one measurement on one device and hold that up as The Truth. A result that you get from any one of these systems is not The Truth, but it is A Truth – you just need more information. If you’re only shown one measurement (or even an average of measurements) that was done on only one measurement system, then you should raise at least one eyebrow, and ask some questions about how that choice of system affects the plots that you see.
In many ways, it’s like looking at a recipe in a cookbook. You might be able to determine whether you might like or probably hate a dish by reading its description of ingredients and how to prepare it. But you cannot know how it’ll taste until you make it and put it in your mouth. And, if you cook like I do, it’ll be just a little different next time. It’s cooking – not a chemistry experiment. If you use headphones like I do, it’ll also be a little different next time because some days, I don’t wear my glasses, or I position the head band a little differently, so the leak around the ear cushion or the clamping force is a little different.
In Part 1, I talked about how any measurement of an audio device tells you something about how it behaves, but you need to know a LOT more than what you can learn from one measurements. This is especially true for a loudspeaker where you have the extra dimensions of physical space to consider.
Thought experiment: Fridges vs. Mosquitos
Consider a situation where you’re sitting at your kitchen table, and you can hear the compressor in your fridge humming/buzzing over on the other side of the room. If you make a small movement in your chair, the hum from the fridge sounds the same to you. This is partly because the distance from the fridge to you is much bigger than the changes in that distance that result from you shifting your butt.
Now think about the times you’ve been trying to sleep on a summer night, and there’s a mosquito that is flying near your ear. Very small changes in the location of that mosquito result in VERY big changes in how it sounds to you. This is because, relative to the distance to the mosquito, the changes in distance are big.
In other words, in the case of the fridge (that’s say, 3 m away) by moving 10 cm in your chair, you were changing the distance by about 3%, but the mosquito was changing its distance by more than 100% by moving just from 1 cm to 2 cm away.
In other words, a small change in distance makes a big change in sound when the distance is small to begin with.
The challenges of measuring headphones
The methods we use for measuring the magnitude response of a pair of headphones is similar to that used for measuring a loudspeaker. We send a measurement signal to the headphones from a computer, that signal comes out and is received by a microphone that sends its output back to the computer. The computer then is used to determine the difference between what it sent out and what came back. Simple, right?
Wrong.
The problems start with the fact that there are some fundamental differences between headphones and loudspeakers. For starters, there’s no “listening room” with headphones, so we don’t put a microphone 3 m away from the headphones: that wouldn’t make any sense. Instead, we put the headphones on some kind of a device that either simulates an ear, or a head, or a head with ears (with or without ear canals), and that device has a microphone (roughly) where your eardrum would be. Simple, right?
Wrong.
The problem in that sentence was the word “simulates”. How do you simulate an ear or a head or a head with ears? My ears are not shaped identically to yours or anyone else’s. My head is a different size than yours. I don’t have any hair, but you might. I wear glasses, but you might not. There are many things that make us different physically, so how can the device that we use to measure the headphones “simulate” us all? The simple answer to this question is “it can’t.”
This problem is compounded with the fact that measurement devices are usually made out of plastic and metal instead of human skin, so the headphones themselves “see” a different “acoustic load” on the measurement device than they do when they’re on a human head. (The people I work with call this your acoustic impedance.)
However, if your day job is to develop or test headphones, you need to use something to measure how they’re behaving. So, we do.
Headphone measurement systems
There are three basic types of devices that are used to measure headphones.
an artificial ear is typically a metal plate with a depression in the middle. At the bottom of the depression is a microphone. In theory, the acoustic impedance of this is similar to a human ear/pinna + the surrounding part of your head. In practice, this is impossible.
a headphone test fixture looks like a big metal can lying on its side (about the size of an old coffee can, for example) on a base. It might have flat metal sides, or it could have rubber pinnae (the fancy word for ears) mounted on it instead. In the centre of each circular end is a microphone.
a dummy head looks like a simplified model of a human head (typically a man’s head). It might have pinnae, but it might not. If it does, those pinnae might look very much like human ears, or they could look like simplified versions instead. There are microphones where you would expect them, and they might be at the bottom of ear canals, but you can also get dummy heads without ear canals where the microphones are flush with the side of the head.
The test system you use is up to you – but you have to know that they will all tell you something different. This is not only because each of them has a different acoustic response, but also because their different shapes and materials make the headphones themselves behave differently.
That last sentence is important to remember, not just for headphone measurement systems but also for you. If your head and my head are different from each other, AND your pinnae and my pinnae are different from each other, THEN, if I lend you my headphones, the headphones themselves will behave differently on your head than they do on my head. It’s not just our opinions of how they sound that are different – they actually sound different at our two sets of eardrums.
General headphone types
If I oversimplify headphone design, we can talk about two basic acoustical type of headphones: They can be closed (where the back of the diaphragm is enclosed in a sealed cabinet, and so the outside of the headphones is typically made of metal or plastic) or open (where the back of the diaphragm is exposed to the outside world, typically through a metal screen). I’d say that some kinds of headphones can be called semi-open, which just means that the screen has smaller (and/or fewer) holes in it, so there’s less acoustical “transparency” to the outside world.
Examples
To show that all these combinations are different, I took three pairs of headphones
open headphones
semi-open headphones
closed headphones
and I measured each of them on three test devices
artificial “simplified” ear
text fixture with a flat-plate
dummy head
In addition, to illustrate an additional issue (the “mosquito problem”), I did each of these 9 measurements 5 times, removing and replacing the headphones between each measurement. I was intentionally sloppy when placing the headphones on the devices, but kept my accuracy within ±5 mm of the “correct” location. I also changed the clamping force of the headphones on the test devices (by changing the extension of the headband to a random place each time) since this also has a measurable effect on the measured response.
Do not bother asking which headphones I measured or which test systems I used. I’m not telling, since it doesn’t matter. Not to me, anyway…
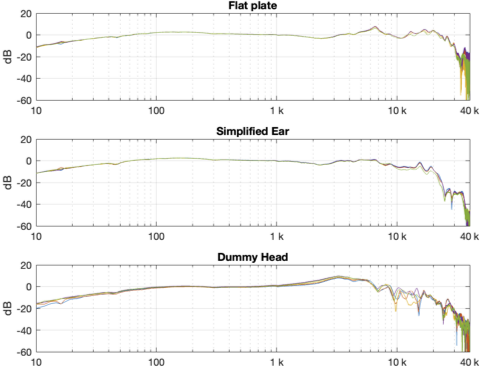
The raw results
I did these measurements using a 10-second sinusoidal sweep from 2 Hz to Nyquist, on a system running at 96 kHz. I’m plotting the magnitude responses with a range from 10 Hz to 40 kHz. However, since the sweep starts at 2 Hz, you can’t really trust the results below 20 Hz (a decade below the lowest frequency of interest is a good rule of thumb when using sine sweeps).
Figure 1: The “raw” magnitude responses of the open headphones measured 5 times each on the three systems
Figure 2: The “raw” magnitude responses of the semi-open headphones measured 5 times each on the three systems
Figure 3: The “raw” magnitude responses of the closed headphones measured 5 times each on the three systems
Looking at the results in the plots above, you can come to some very quick conclusions:
All of the measurements are different from each other, even when you’re looking at the same headphones on the same measurement device. This is especially true in the high frequency bands.
Each pair of headphones looks like it has a different response on each measurement system. For example, looking at Figure 3, the response of the headphones looks different when measured on a flat plate than on a dummy head.
The difference in the results of the systems are different with the different headphone types. For example, the three sets of plots for the “semi-open” headphones (Fig. 2) look more similar to each other than the three sets of plots for the “closed” headphones (Fig. 3)
the scale of these differences is big. Notice that we have an 80 dB scale on all plots… We’re not dealing with subtleties here…
In Part 3 of this series, we’ll dig into those raw results a little to compare and contrast them and talk a little about why they are as different as they are.
People who work in the audio industry use all kinds of different measurements to evaluate the performance of equipment. In many cases, the measurements we do are chosen because they’re easy to do (or because they were easy to do in “The Old Days”), and not because they accurately represent how the equipment actually behaves.
Magnitude response
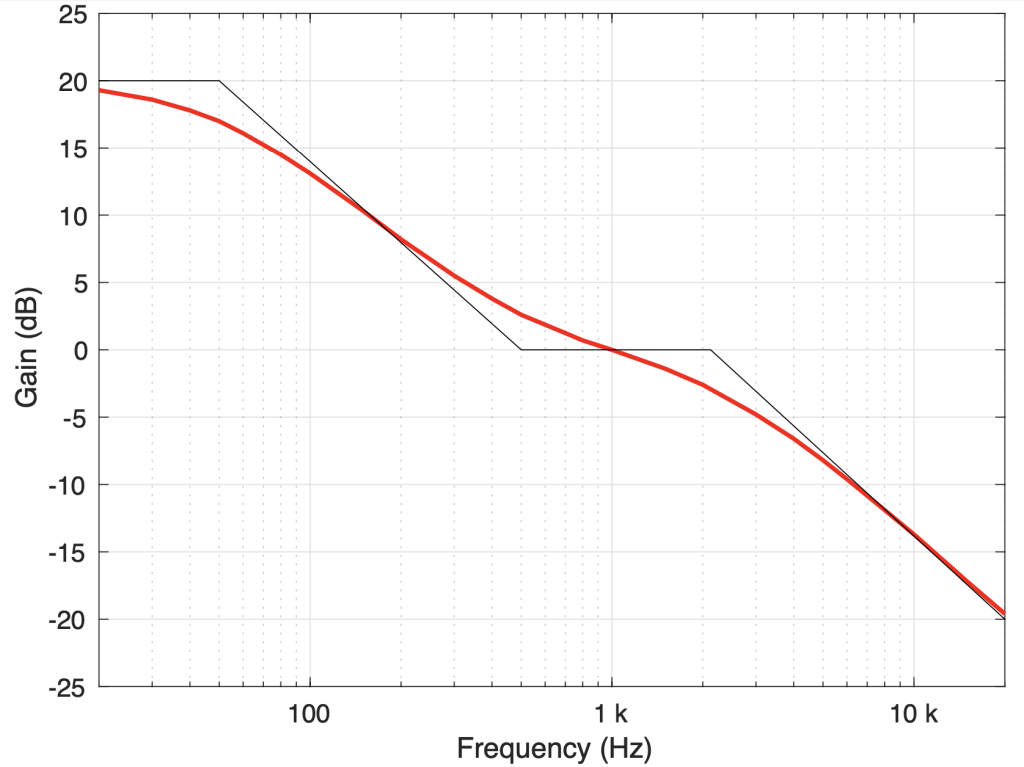
One simple example of this is what most people call a frequency response but what is actually a magnitude response. This is a measure of how the level of an audio signal is changed by the device under test (the “DUT”) as a function of frequency. For example, if you’re measuring a RIAA-spec preamplifier (used for converting a turntable’s pickup’s output to a “line” level signal), then it should have a magnitude response that looks like the red line in the plot in Figure 1.
Figure 1: The red line shows the correct magnitude response for the frequency-dependent filtering in a RIAA phono preamplifier.
This curve shows that, relative to a signal at 1 kHz, the lower the frequency, the more gain is applied to the signal and the higher the frequency, the more attenuation is applied to the signal. Note that this curve is normalised to the level at 1 kHz, which should actually be +40 dB higher if we were to include the frequency-independent gain of the system.
It’s important to remember that this plot shows us only one thing: the change in level caused by the DUT as a function of a change in frequency of the signal. What this plot does NOT show us is much, much more… For example:
We don’t know anything about the behaviour of the system outside the boundaries of this plot.
We don’t know anything about its phase response.
We don’t know anything about how loud the noise of the DUT is.
We don’t know if this plot is true if we were to measure the DUT at a different input level.
We don’t know whether the DUT would have a different behaviour if the device that was feeding it had a different output impedance.
We don’t know whether the DUT would have a different behaviour if the device that it was feeding had a different input impedance.
We don’t know anything about whether the signal has any non-linear distortion artefacts. (Notice that I didn’t say “…whether the signal is distorted” because we know it’s distorted, since the output of the DUT is not the same as the input of the DUT. Any change in the signal is a form of distortion of the signal.)
I’m not saying that a simple magnitude response plot of a DUT is not useful. I’m just saying that it’s not enough information. It’s like asking for the temperature of a cup of coffee. It’s useful information, but it doesn’t tell you enough to know whether you’re going to enjoy drinking it (unless, of course, you hate coffee…)
This problem gets even worse when you’re measuring the acoustic output of a device like a loudspeaker or a pair of headphones, for example. (The acoustic input of a microphone is a similar problem in the opposite direction.)
Let’s start by thinking about a loudspeaker’s output in real life.
You have a device that radiates sound in space in all directions. Let’s look at that space from the loudspeaker’s perspective and say that this means an angle of rotation around the loudspeaker, and an angle of elevation above/below the loudspeaker. That makes two dimensions.
If we’re talking about the loudspeaker’s magnitude response, then we’re looking at its output level (one dimension) as a function of frequency (one more dimension).
That speaker is (usually) in a room, and you’re probably also there too. We can then that this is in three-dimensional space when we talk about the walls, floor, ceiling, and your location inside that space.
Since the surfaces in the room reflect the audio signal, then the time at which the signal arrives at the listening position must also be considered. The “sound” of a loudspeaker at a listening position before the first reflection arrives is different than after a bunch of reflections are coming in and the room has started resonating as well. So, time adds one more dimension to the problem.
We’ll ignore the non-linear distortion artefacts produced by the loudspeaker and the fact that they radiate in different directions differently, since it’s already complicated enough… However, if we were to add things like changes in the response due to temperature of the voice coil or directionally-dependent distortion artefacts like breakup, this would wind up being a much longer discussion…
So, just looking at the small list of “usual suspects” above, we can see that evaluating the sound of a single loudspeaker in a listening room is at least an 8-dimensional problem. And this doesn’t even take things like 2-channel stereo or 7.1.4 multichannel or whether you’re listening to Aretha Franklin or Stockhausen into account…
In other words, it’s complicated. So, we use reductionism to try to start to get an idea of what’s going on. We put a microphone directly in front of a loudspeaker and measure its magnitude response at one level using one kind of test signal (e.g. a swept sine wave or an MLS) and we remove all the room’s reflections somehow. This reduces our 8-dimensional problem to a 2-dimensional version: we have level as a function of frequency and nothing else, since we’ve chosen to throw away everything else by the way we did the measurement.
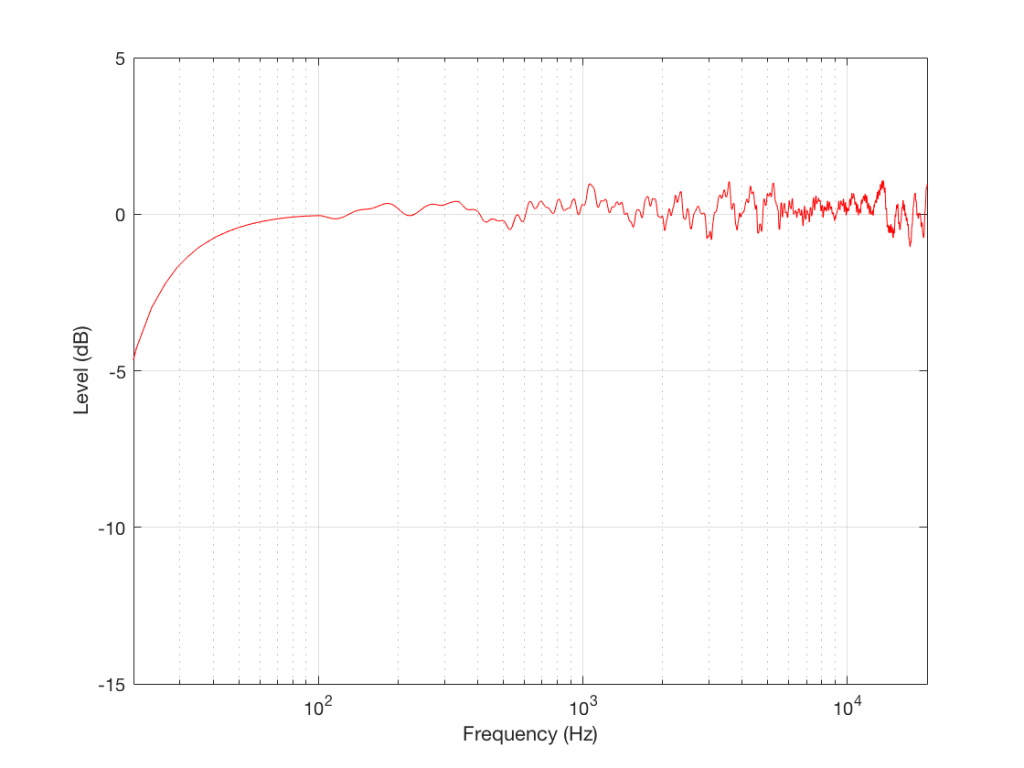
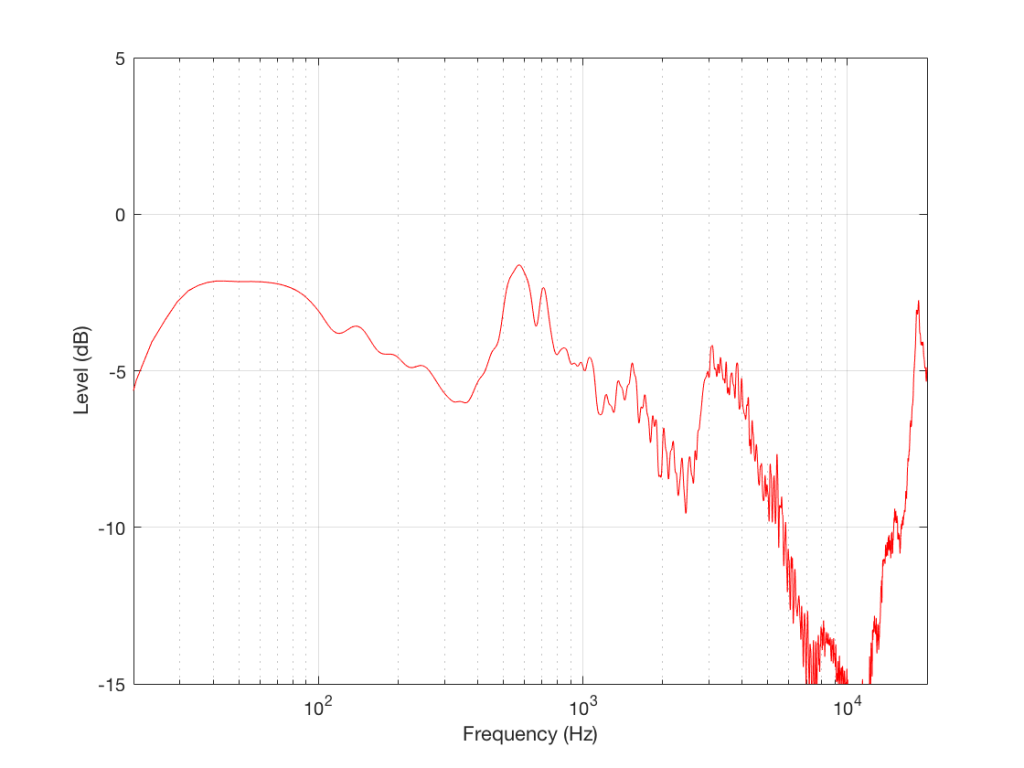
Figure 2: The on-axis, free-field magnitude response of a loudspeaker.
For example, take a look at the magnitude response shown in Figure 2, which is a real measurement of a real loudspeaker. This measurement was performed using a swept-sine (a sinusoidal wave with a frequency that changes smoothly over time, typically from low to high) with a microphone on-axis to the loudspeaker at a distance of 3 m. The measurement was time-windowed to remove the room reflections, and therefore can be considered to be a “free field” (a sound field that is free of reflections) measurement. However, the roll-off in the low end is actually a combination of the actual response of the loudspeaker and the artefacts of using a shorter time window. (We would have needed to use a much bigger room to get less influence from the time windowing.)
So, this plot ONLY tells us how the loudspeaker behaves at one point in infinite space, when we’re ONLY asking “how does the level of the loudspeaker’s output vary with changes in frequency and we ONLY play sinusoidal signals at one level.” This is all useful information, but we need to know more – otherwise, we’ll jump to conclusions about whether this loudspeaker sounds “good” or not.
Just like looking at ONLY the temperature of a cup of coffee, this doesn’t give us enough of the story to know how the loudspeaker will “sound” (no matter what a magazine reviewer will try and tell you…).
In other words, if we use reductionism to understand the problem, you simplify the question so much that the problem you wind up understanding is not the same as the thing you’re trying to understand in the first place.
For example, if we measure that same loudspeaker at a different angle (by rotating the loudspeaker and leaving the microphone in place) we’ll see a magnitude response like the one shown in Figure 3.
Figure 3: The free-field magnitude response of the same loudspeaker, measured at 90º off-axis.
This magnitude response is the output of the same loudspeaker at 90º off-axis, which might be what’s heading towards your side-wall. If your side wall is perfectly reflective, then this is therefore the magnitude response of your first reflection, which might be a bad thing if you think that it’s important.
So, when you’re looking at any one measurement of anything, you don’t have enough information to know enough to make a general evaluation. However, unfortunately, many people will run with this information and make the evaluation anyway. It’s data, and data doesn’t lie, so this tells the truth, right?
Wrong. Because it’s only a portion of the total truth.
For example, you can say that “organic food is good for me” but I have an allergy to peanuts. So if I eat organic peanuts, I have about 20 minutes to get to a hospital. Much longer than that and I need a funeral home instead. “Organic” is true, but not enough information for me to know whether or not it’ll be an uneventful meal.
In Part 1 of this series, I talked about how a binaural audio signal can (hypothetically, with HRTFs that match your personal ones) be used to simulate the sound of a source (like a loudspeaker, for example) in space. However, to work, you have to make sure that the left and right ears get completely isolated signals (using earphones, for example).
In Part 2, I showed how, with enough processing power, a large amount of luck (using HRTFs that match your personal ones PLUS the promise that you’re in exactly the correct location), and a room that has no walls, floor or ceiling, you can get a pair of loudspeakers to behave like a pair of headphones using crosstalk cancellation.
There’s not much left to do to create a virtual loudspeaker. All we need to do is to:
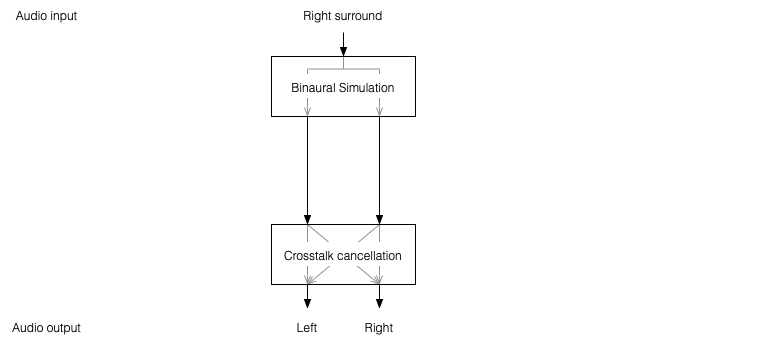
Take the signal that should be sent to a right surround loudspeaker (for example) and filter it using the HRTFs that correspond to a sound source in the location that this loudspeaker would be in. REMEMBER that this signal has to get to your two ears since you would have used your two ears to hear an actual loudspeaker in that location.
Send those two signals through a crosstalk cancellation processing system that causes your two loudspeakers to behave more like a pair of headphones.
Figure 1: A block diagram of the system described above.
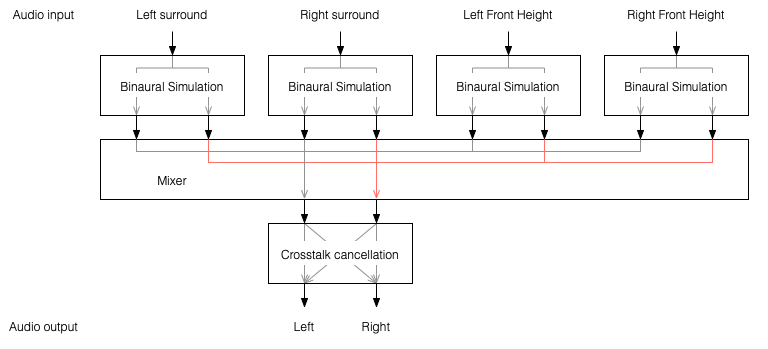
One nice thing about this system is that the crosstalk cancellation is only there to ensure that the actual loudspeakers behave more like headphones. So, if you want to create more virtual channels, you don’t need to duplicate the crosstalk cancellation processor. You only need to create the binaurally-processed versions of each input signal and mix those together before sending the total result to the crosstalk cancellation processor, as shown below.
Figure 2: You only need one crosstalk cancellation system for any number of virtual channels.
This is good because it saves on processing power.
So, there are some important things to realise after having read this series:
All “virtual” loudspeakers’ signals are actually produced by the left and right loudspeakers in the system. In the case of the Beosound Theatre, these are the Left and Right Front-firing outputs.
Any single virtual loudspeaker (for example, the Left Surround) requires BOTH output channels to produce sound.
If the delays (aka Speaker Distance) and gains (aka Speaker Levels) of the REAL outputs are incorrect at the listening position, then the crosstalk cancellation will not work and the virtual loudspeaker simulation system won’t work. How badly is doesn’t work depends on how wrong the delays and gains are.
The virtual loudspeaker effect will be experienced differently by different persons because it’s depending on how closely your actual personal HRTFs match those predicted in the processor. So, don’t get into fights with your friends on the sofa about where you hear the helicopter…
The listening room’s acoustical behaviour will also have an effect on the crosstalk cancellation. For example, strong early reflections will “infect” the signals at the listening position and may/will cause the cancellation to not work as well. So, the results will vary not only with changes in rooms but also speaker locations.
Finally, it’s worth nothing that, in the specific case of the Beosound Theatre, by setting the Speaker Distances and Speaker Levels for the Left and Right Front-firing outputs for your listening position, then you have automatically calibrated the virtual outputs. This is because the Speaker Distances and Speaker Levels are compensations for the ACTUAL outputs of the system, which are the ones producing the signal that simulate the virtual loudspeakers. This is the reason why the four virtual loudspeakers do not have individual Speaker Distances and Speaker Levels. If they did, they would have to be identical to the Left and Right Front-firing outputs’ values.