When I was growing up in Newfoundland, we had an old gramophone in our basement that I was told, came from my great-grandfather’s house. That was about 50 years ago.
On a recent trip home from Denmark, I dismantled it and brought it back with me, with a plan to restore it. The first step was to find out what, exactly, it is, since I will have to buy some replacements for some broken or missing pieces.
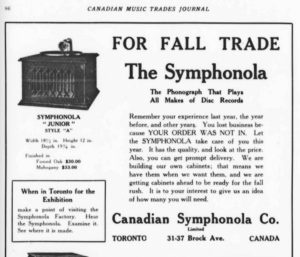
It appears to be a “Junior” model from a company called the Canadian Symphonola Co., Limited, which had a factory and headquarters at 31-37 Brock Avenue, Toronto.
This advertisement for the Junior is from the Canadian Music Trades Journal in August, 1917. Mine is the Fumed Oak variant.
One interesting thing that I’ve come across when digging into this was this advertisement from the Toronto Daily Star in December, 1917.
The >100-year old text is weirdly familiar in these times of rather unstable international relationships. History has a tendency to rhyme.
For more information about the Symphonola company, this page at capsnews.org is a great resource. (it’s also where I found those two screenshots above…)