As can be seen, it was never my intention to make an entirely new binding, so it maintains the patina of an old book. I just wanted to stabilise the original one and make the book useable and considerably less fragile.
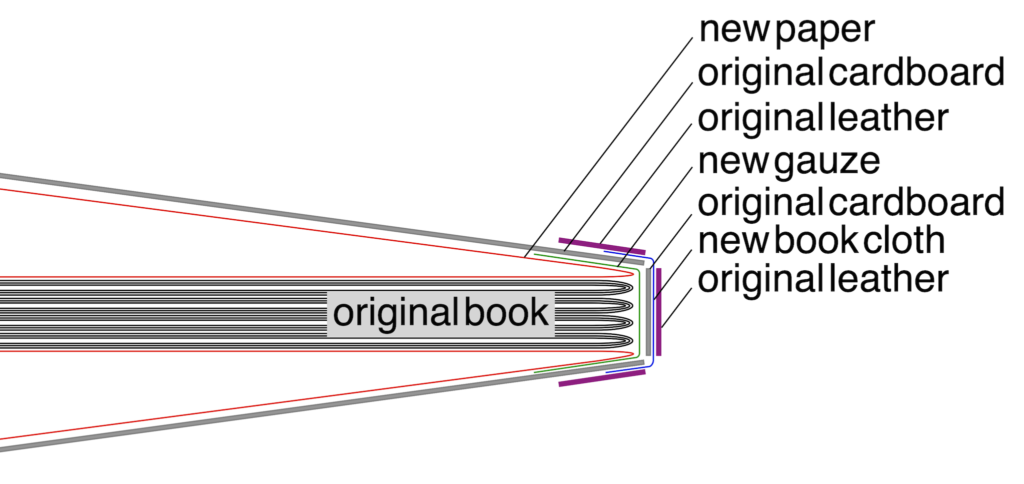
A simplified diagram of the layers in the final book. Not shown in this breakdown are the paper backing and the sewing on the original book, and the location of the glue.
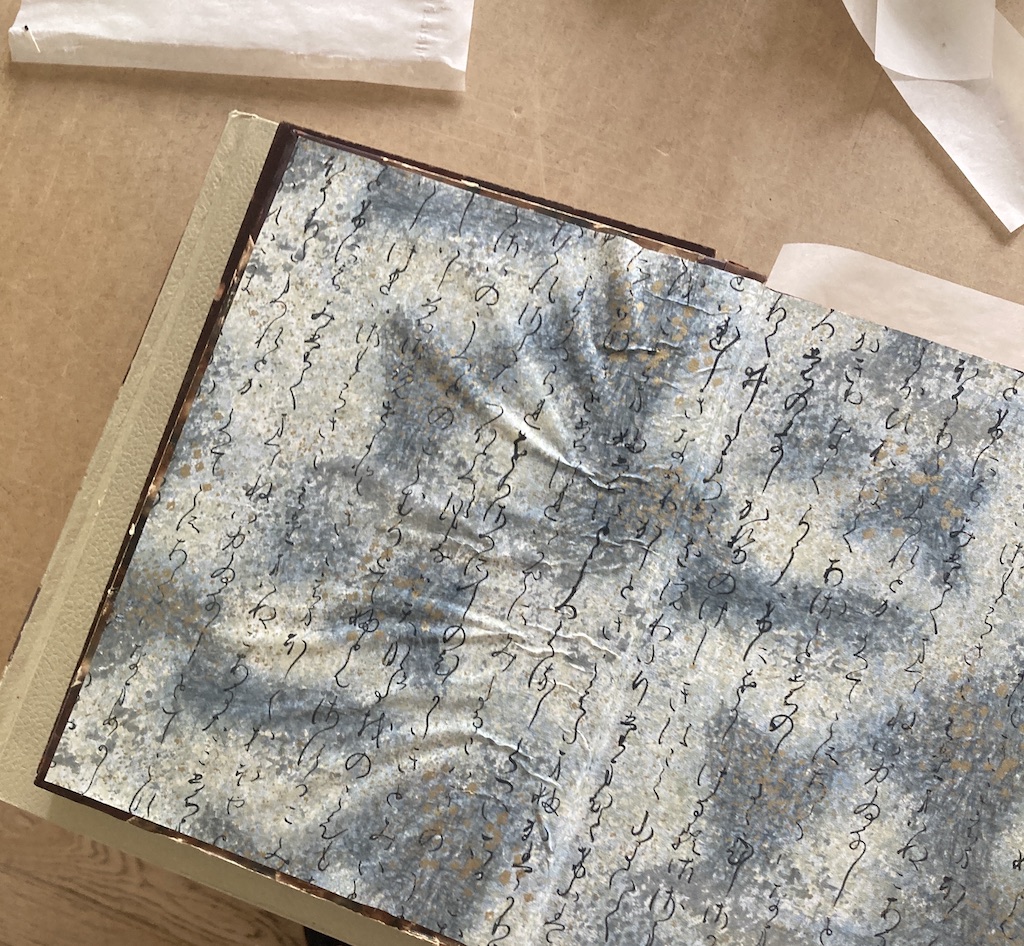
Final assembly begins with gluing the edge of a piece of Japanese paper to the original purple paper. This was done with just a thin line of glue (about 5 mm wide). (In this photo, you see the back of the Japanese paper that will be glued to the inside of the cover.)
Then, the gauze was glued down and then the entire side of the paper that you see there was coated with glue. This is then attached to the inside of the cover. (I realised after it was too late that I take blurry, out-of-focus photos when I’m rushing to get it done before the glue makes the paper wrinkle too much… Sorry.)
The moisture of the glue caused the Japanese paper to wrinkle, as expected. This was smoothed out using a rubber roller, the bone folder, and my fingers.
Then the whole thing was clamped overnight to prevent the covers from curling due to the glue. Notice the fabric spine (with the original cardboard spine glued to its inside) that will be covered with the original leather in the next step.
The leather has been glued to the fabric spine and then the whole thing was wrapped in the elastic bandage. Again, the baking paper keeps things that shouldn’t stick from sticking together.
Then back under the weights for another night, bandages and all.
The first step was to prepare the spine reinforcement with gauze and bookbinding glue. The gauze is about 3x the width of the spine. The extras on the sides will form part of the hinges when they’re finally glued to the inside of the covers.
I made a temporary support out of wood for gluing the curved cardboard to the underside of the cloth that will become the new back. Fat-resistant baking paper is placed between the cardboard and the wood to make sure it doesn’t all stick together. The entire thing is wrapped in an elastic bandage.
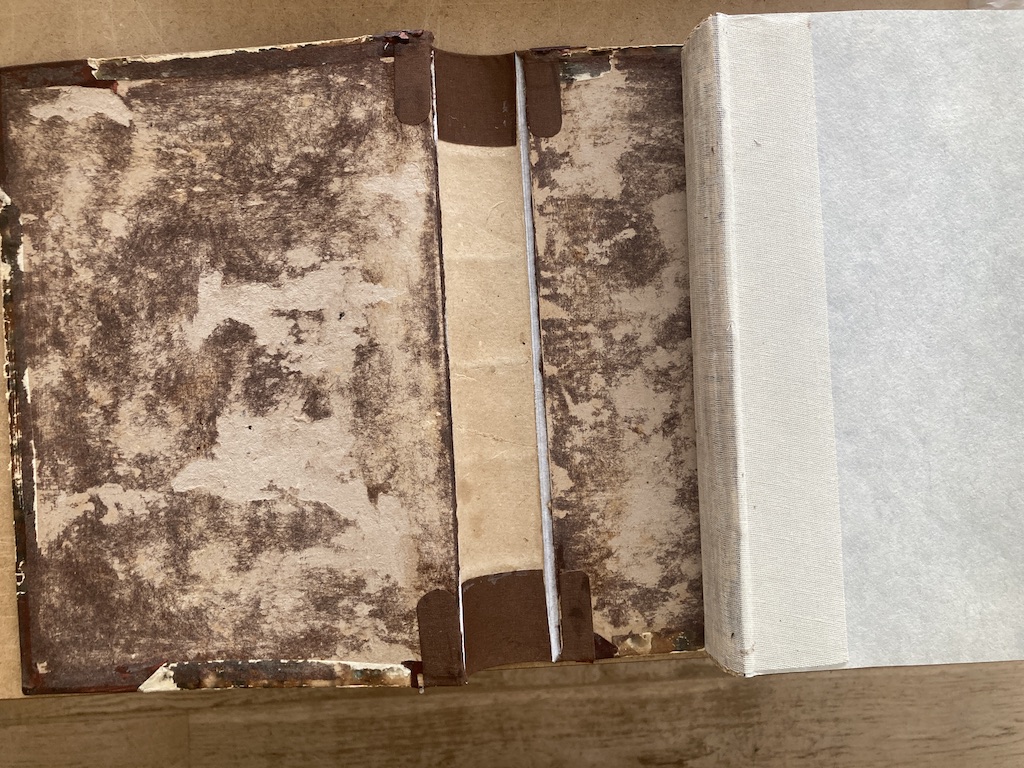
The cloth+cardboard spine has been glued to the covers by gluing the cloth under the leather strips. Notice in the middle that the cloth has been folded over the top and bottom of the cardboard (on the left and right of the photo).
The two tabs that are sticking out will be folded and glued to the insides of the covers under the paper. The gauze reinforcement on the book’s spine is also easily visible at the top of the photos.
I made 5 bevelled leather strips and glued them to the inside of the leather backing. Because of the twist in the leather, it looks like they’re not parallel, but they are… I promise…
The four tabs were glues to the insides of the front and back covers.
New, machine-sewn headbands were glued onto the spine and reinforced with a little more gauze.
Step 1 of the dismantling was to cut off the back of the cover. I had my doubts about whether I wanted to slice through that nice leather, but it was the only way to ensure that the new binding would be done properly.
All of the loose paper shreds had to be shaved off the spine. Initially, this was done with a scalpel, and then with 80-grit sandpaper.
Luckily, all of the sewing and the cords are still in place, so I didn’t have to completely disassemble the book and re-sew it.
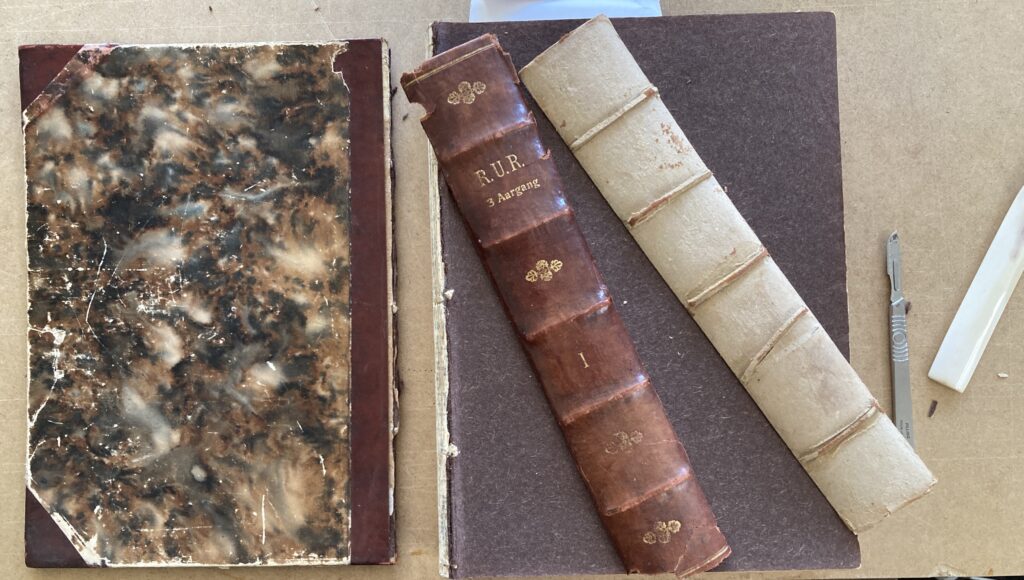
The card and leather cover of the back came apart fairly easily. Notice that the ribs in the leather were just for decoration, and not cords used in the binding. They’re cardboard strips, 4 mm wide at the base and 2 mm wide at the top. I’ll make new ones to replace these.
All of the bits and pieces so far…
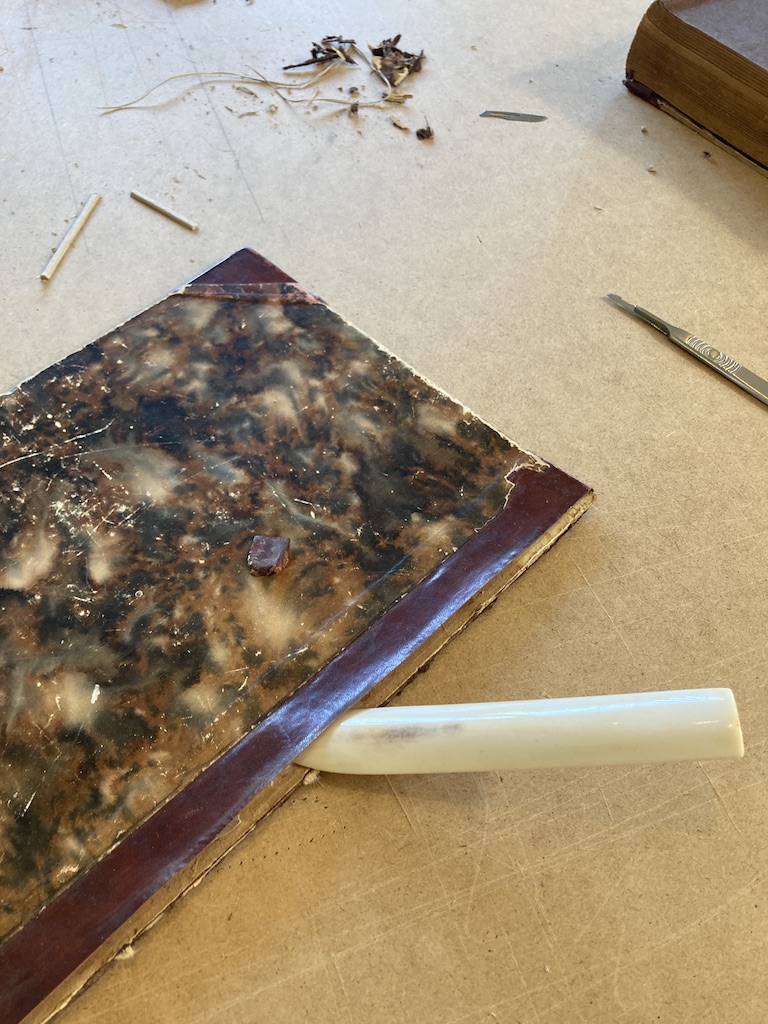
I used a bone folder and the scalpel to separate the leather strip from the card underlay. I only cut down to the line where the marbled paper meets the leather. This way, there was still some old hide glue holding the leather in place. The new binding material will slide in under the leather.
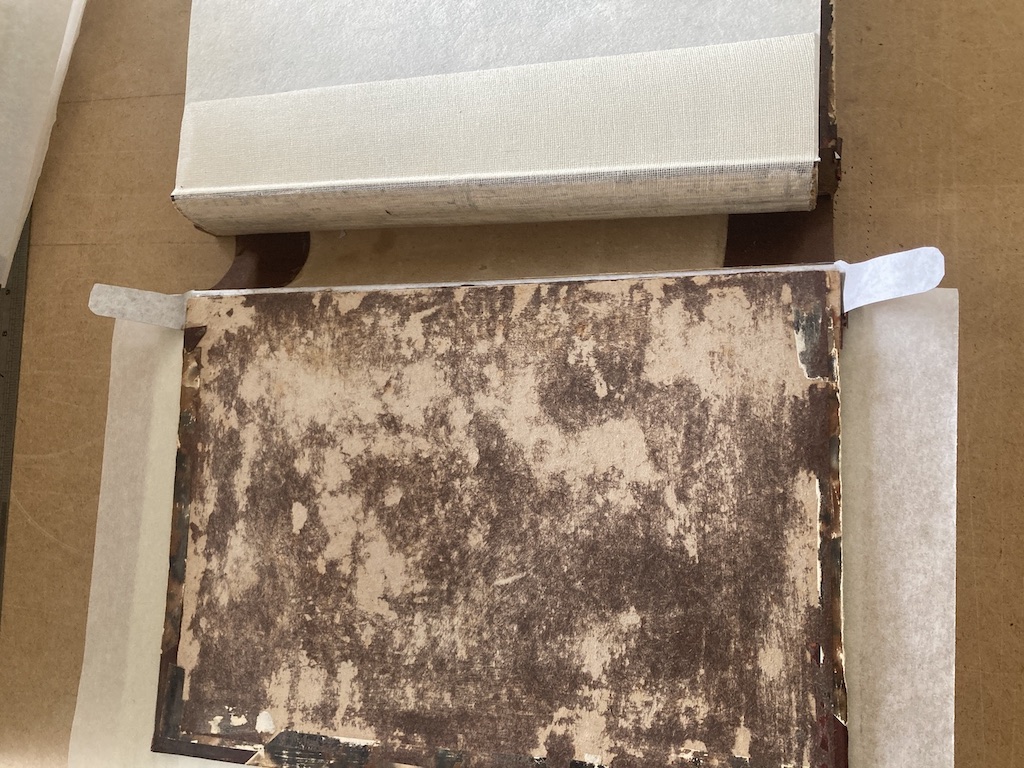
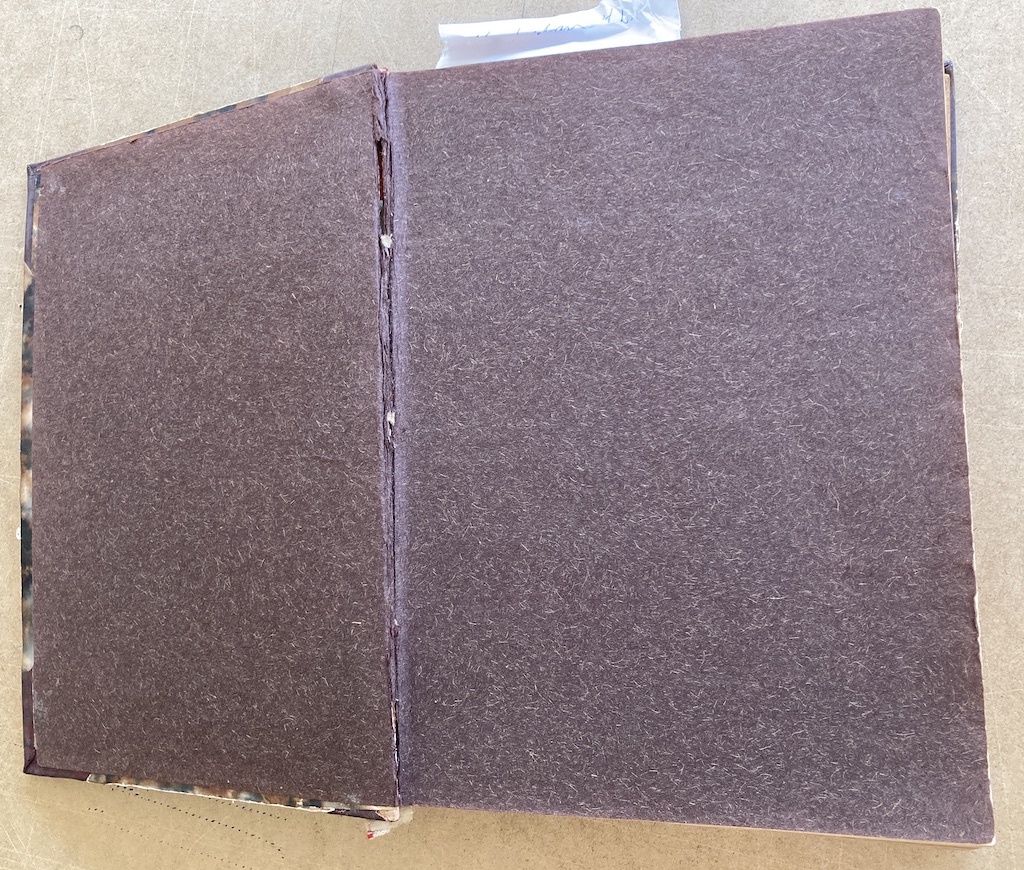
All of the paper was initially scraped, and then sanded off the inside of both covers. A little spray of water helped here, soaking it just enough to be able to rub off a large amount with my fingers (which turned purple as a result…)
Both covers were a little warped, so, while they were still a little damp, I used an iron to heat them up and straighten them out, and then I left them in a press between two pieces of plywood for a couple of days.
I have a bunch of hobbies, and I am particularly pleased when they intersect or overlap.
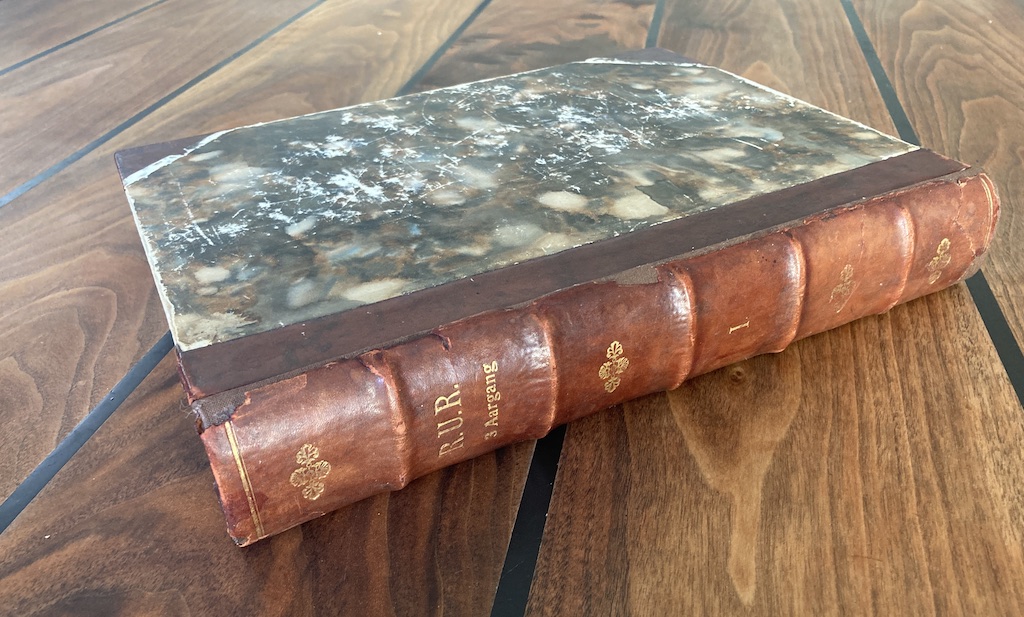
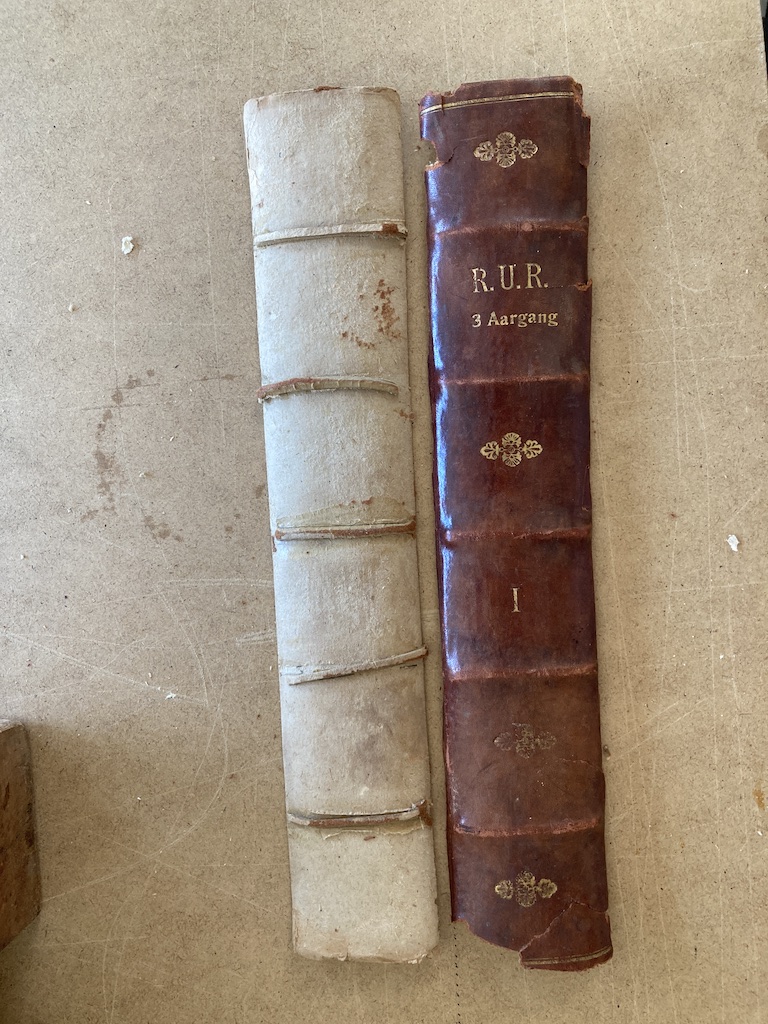
This weekend’s project started with a visit to a good friend who has a large collection of magazines and books about radio and audio dating back over 100 years. One of the books on his shelf was a bound set of Radio Uge-Revue magazine from 1926, however, after 100 years and much use, the binding has disintegrated. So, I took the book home with an agreement that I would try to repair the book and, in return, he would not criticise my amateurish attempts…
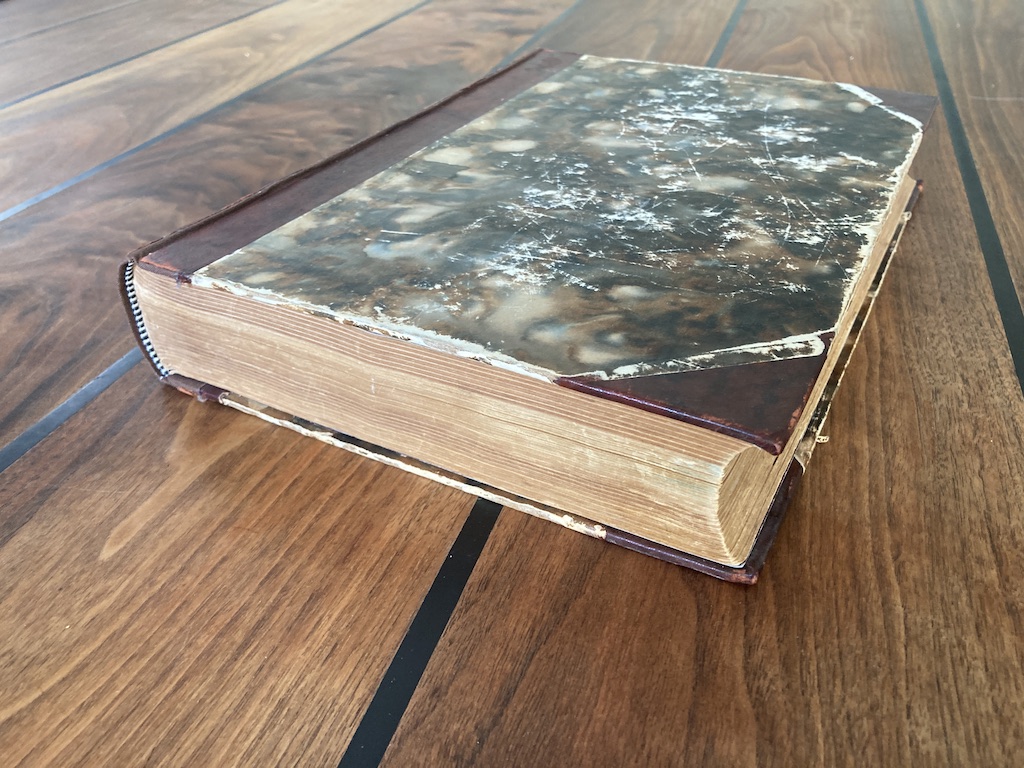
This was the starting point. The leather spine of the book has become completely torn away from the leather strip on one cover. Structurally, the rest of the binding turned out to be in decent shape, so I spent a lot of time debating what to do.
The spine was nicely attached to the other cover, and the internal threads were in decent shape.
Both headbands were in pretty bad shape, as was the paper covering on the spine itself.
So, step one was to start dismantling the binding – but only as much as necessary…
I’ve started working with a number of my colleagues on a series of videos for internal training at Bang & Olufsen. They were kind enough to make some of these videos publicly available.
This video illustrates the difference between the two main categories of reflections.
I’ve started working with a number of my colleagues on a series of videos for internal training at Bang & Olufsen. They were kind enough to make some of these videos publicly available.
This video demonstrates some of the individual components of a room’s acoustical contributions.
I’ve started working with a number of my colleagues on a series of videos for internal training at Bang & Olufsen. They were kind enough to make some of these videos publicly available.
This video demonstrates one of the more important problems that we face in dealing with a room’s acoustical contribution to “the sound” of a loudspeaker: room modes (or room resonances), as well as some basic introduction to some strategies for compensating for them.
I’ve started working with a number of my colleagues on a series of videos for internal training at Bang & Olufsen. They were kind enough to make some of these videos publicly available.
This video presents an intuitive explanation of why we typically need bigger loudspeaker drivers to reproduce low frequency bands, and smaller drivers for higher bands.