We’ve seen in a previous posting that timing errors can occur in wireless audio systems. As we saw there, the wrong way to deal with this is to simply drop or repeat samples when the receiver realises it’s out of synchronisation with the transmitter. A better way to do it is to smoothly drift the sampling rate to either catch up or slow down – although this causes the modern-day equivalent of “wow and flutter”, since variations in the sampling rate will cause pitch shifts at the output. The trick here is to make changes slowly so as to get away with it…
However, what I didn’t address in that posting was how bad the problem can be – I only talked about how not to correct the problem when you know you have one.
So, let’s do a different (but related) test. I made a signal that consists of “digital black” – a long string of zeros – and therefore silence. Then, I made a single-sample spike every second (for example, every 44100 samples in a 44.1 kHz sampling rate system). In order to not make anything unhappy, I gave the clicks a value of 0.5 – so nothing is close to overloading…
Then, I transmitted that signal to an audio device wirelessly and recorded its output.
Figure 1, below, shows the original signal on top, and the recorded output of the device under test (the “DUT”) on the bottom.
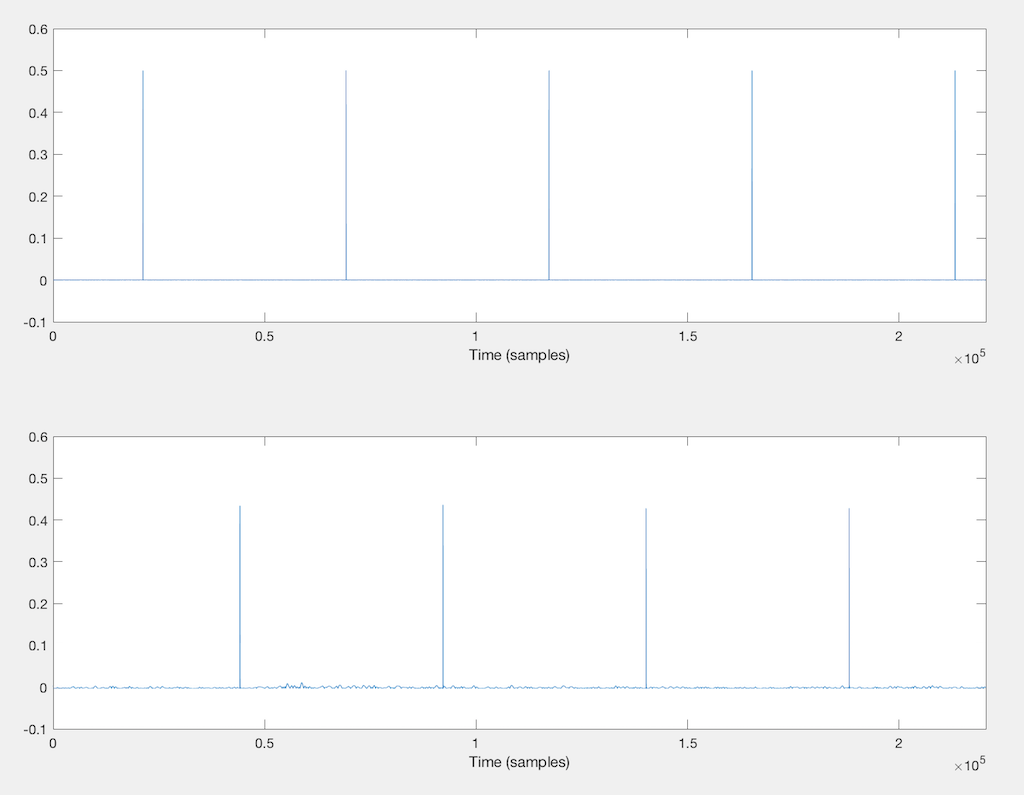
You may notice that there is a little noise in the bottom plot. This is because this particular DUT has an acoustical output, and the noise you see there (partly) is acoustical noise in the room and measurement system.
Note that this plot shows only the first 5 seconds of a test that actually ran for 10 minutes.
Then, I wrote a little Matlab script that finds the spikes in each signal, and counts the number of samples between spikes. So, in a system running at 44.1 kHz I would expect that there is 1 spike every 44100 samples – both at the input to the system (the original signal) and its output. In other words, I’m finding out how far apart those spikes are with a resolution of 1 sample.
So, I find the duration between clicks at the output of the DUT, convert from samples to milliseconds, and plot the error over the full 600 seconds (10 minutes) of the test. In theory, there is no error – and each duration is exactly 1 second ±0 ms. In practice, however, this is not true.
For this posting, I tested two commercially-available devices, transmitting from the same device.
Figure 2 shows the results for that first device. As you can see there, one second at the device’s input does not correspond to 1 second at its output. It drifts from a little under 999.7 ms to a little over 1000.2 ms. Note that, for this test, I don’t know from the measurement how that change takes place – whether it’s shifting slowly or using a skip/insert strategy. I just know one version of how bad the problems is over time on a second-by-second basis.
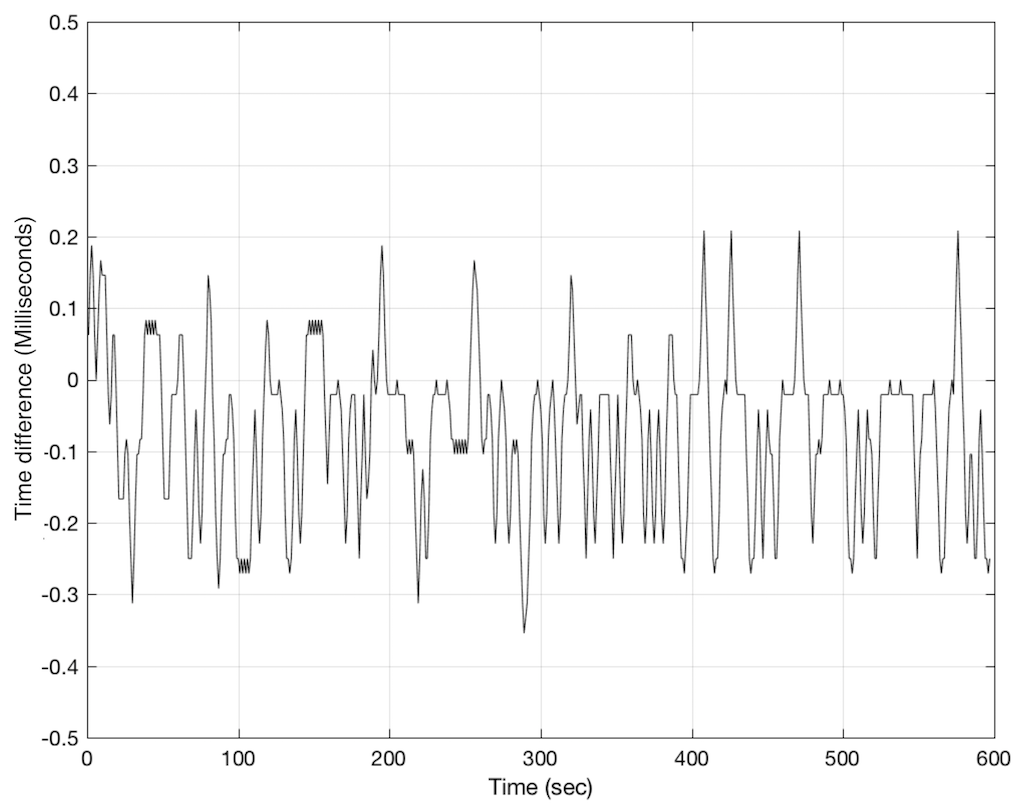
Figure 3, below, shows the same analysis for another device. Notice that there are three colours in this plot, corresponding to three separate tests of the same device…
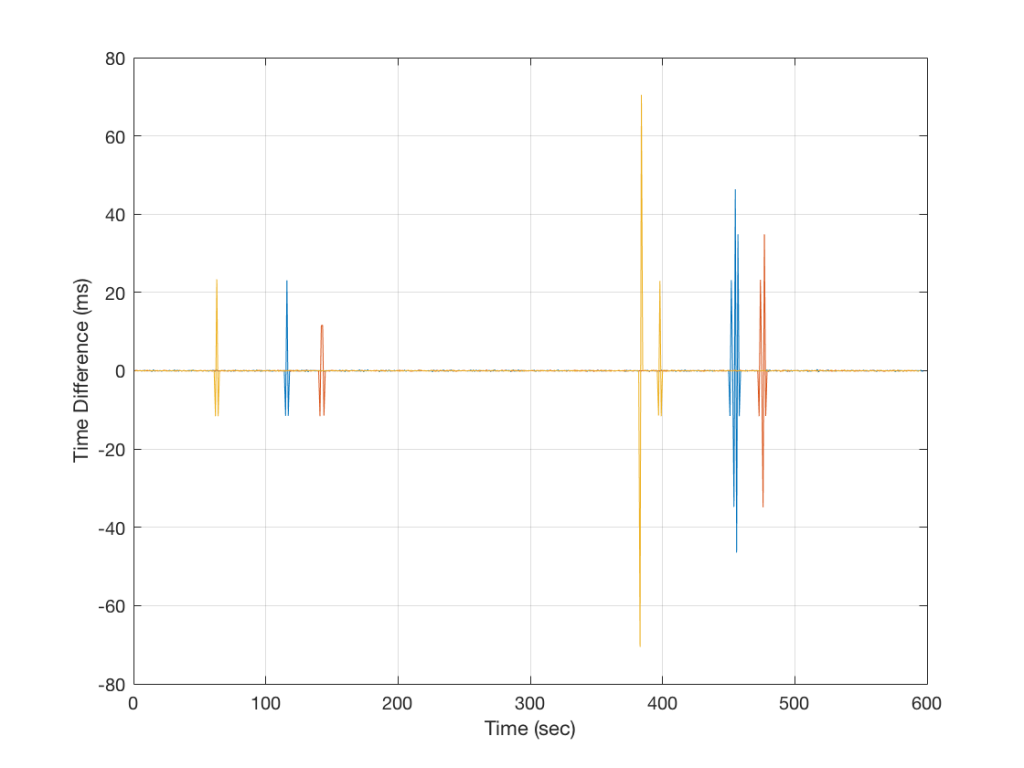
As you can see there, this device seems to be behaving most of the time, but occasionally gets a little lost and jumps by to about ±70 ms in a worst case. This means that, for this test, we can see that “1 second” can last anything between about 930 ms and 1070 ms. Note that this analysis doesn’t show what happens at the moment (or during the time) that jump occurs – we only know that it has happened sometime between clicks at the output.
You may be wondering why the plot in Figure 2 is more “jagged” than the one in Figure 3. This is mostly because the scale of the two plots is so different. If we were to zoom in to the plot in Figure 3, we would see that it is roughly as busy, as is shown below in Figure 4.
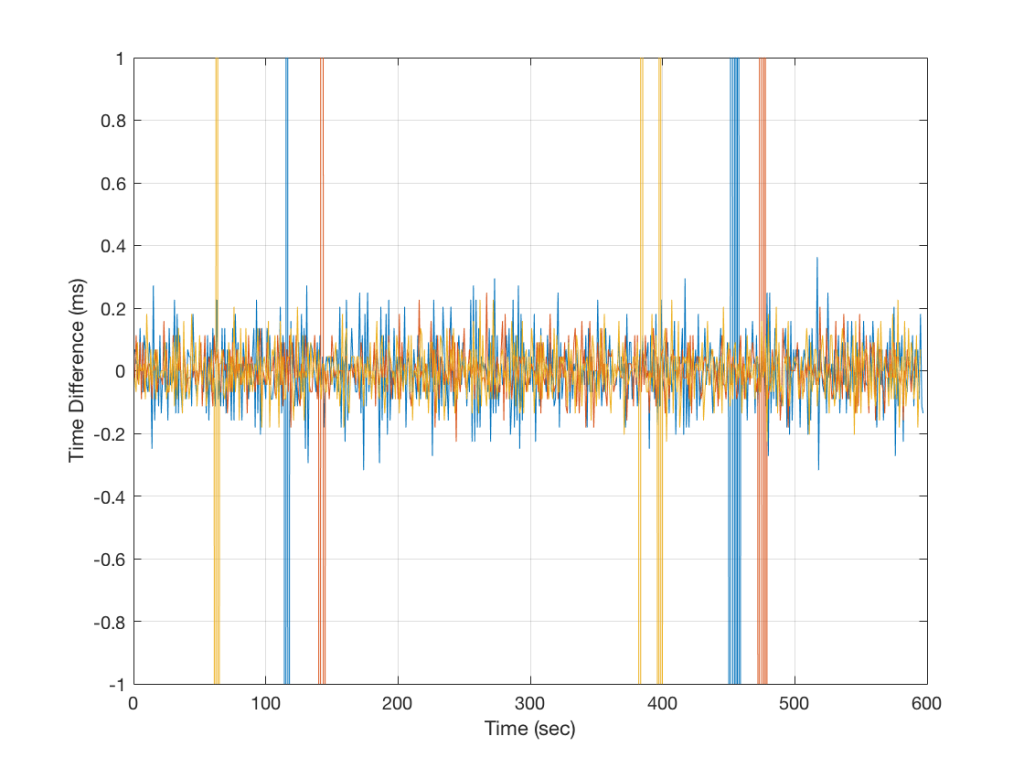
One significant difference between these two devices is that the first has an acoustical output and the second has an electrical output. This may cause you to wonder whether the acoustical noise in the first measurement contributes to the error. This may be possible. However, a 0.2 ms (or 200 µs) error is roughly equivalent to 9 samples at 44.1 kHz (or a 6.9 cm shift in distance between the DUT and the microphone). This is well outside the range of the error generated by acoustical noise – so that cannot be held responsible as being the only contributor to the error measurement.
I should say that the wireless audio protocol that was used for these two tests were the same… So, this is not a comparison of two different transmission systems. Also, as I mentioned above, the transmitter was the same for both DUT’s. So, the difference in results here are attributable to the skill and attention to the execution of the manufacturers of the two receiving devices.
As always, don’t bother asking which devices these DUT’s are. I’m not telling – primarily because it doesn’t matter. I’m just using these two devices as examples of errors I often see when I measure audio equipment…
One additional thing that might be of interest to geeks like me. That second DUT has a digital audio output, which is what I used to capture its signal. Interestingly, when I measure the sampling rate of that output with a digital audio signal analyser, the sampling rate is typically within 2 ppm of the correct frequency. So, ignoring the big spikes in Figure 3 (which are probably the result of buffer over- or under-runs) if the timing errors we see in Figure 4 were solely caused by a clock error that was visible on the digital audio output, then we should not see deviations of no more than approximately 2 microseconds per second. Instead, we see changes on the order of 1 to 2 milliseconds per second, which indicates a sample rate drift of 1000 to 2000 ppm… So, this means that, although the sampling rate of my transmitter and the output sampling rate of my receiver (the DUT) are nominally the same, AND there is very low jitter / error on the DUT’s output sampling rate, something else in the audio signal path is causing this error. In other words, a simple measurement of the digital output’s sampling rate is not adequate to verify that the DUT’s clock is behaving.